WorldSkills2012 : Différence entre versions
(→Semaine 7) |
(→Résultat) |
||
| (24 révisions intermédiaires par 2 utilisateurs non affichées) | |||
| Ligne 1 : | Ligne 1 : | ||
| + | <include nopre noesc src="/home/pedago/pimasc/include/video-WorldSkills2012-iframe.html" /> | ||
| + | __TOC__ | ||
| + | <br style="clear: both;"> | ||
== Présentation == | == Présentation == | ||
[[Fichier:WorldSkills2013.jpg|thumb|right|Logo des WorldSkills 2013]] | [[Fichier:WorldSkills2013.jpg|thumb|right|Logo des WorldSkills 2013]] | ||
Le but de ce projet est de se préparer pour les WorldSkills 2013 dans le métier de Robotique Mobile. | Le but de ce projet est de se préparer pour les WorldSkills 2013 dans le métier de Robotique Mobile. | ||
| − | ===WorldSkills=== | + | ===WorldSkills Competition=== |
WorldSkills une compétition qui à lieu à Leipzig en Allemagne du 2 au 7 Juillet 2013. Cette compétition est connue en France sous le nom d'Olympiades des Métiers, la final nationale de la 42ème édition ayant eu lieu du 22 au 24 Novembre 2012 à Clermont-Ferrand. Cette année, un millier de jeunes concurrants du monde entiers vont s'affronter dans plus de 50 métiers à Leipzig en Allemagne. Pour plus d'information voici les liens vers les pages de [http://www.worldskills-france.org/ WorldSkills France] et [http://www.worldskills.org/ WorldSkills International]. | WorldSkills une compétition qui à lieu à Leipzig en Allemagne du 2 au 7 Juillet 2013. Cette compétition est connue en France sous le nom d'Olympiades des Métiers, la final nationale de la 42ème édition ayant eu lieu du 22 au 24 Novembre 2012 à Clermont-Ferrand. Cette année, un millier de jeunes concurrants du monde entiers vont s'affronter dans plus de 50 métiers à Leipzig en Allemagne. Pour plus d'information voici les liens vers les pages de [http://www.worldskills-france.org/ WorldSkills France] et [http://www.worldskills.org/ WorldSkills International]. | ||
| Ligne 18 : | Ligne 21 : | ||
Le principe de cette épreuve est d'aller chercher les enfants dans les arbres pour les emmener à l'école. | Le principe de cette épreuve est d'aller chercher les enfants dans les arbres pour les emmener à l'école. | ||
| − | Les enfants seront | + | Les enfants seront représentés par des figurines de types Fisher Prices. Les arbres sont représentés par des plots de différentes hauteurs et l'école par une zone de couleur sur la piste. Les enfants seront mis sur une palette dans certains arbres. Il faudra aller chercher toutes les palettes et les emmener à l'école sans faire tomber les enfants qui sont dessus. L'école est également le point de départ du robot. |
<gallery> | <gallery> | ||
| Ligne 31 : | Ligne 34 : | ||
Le principe de cette épreuve est d'assembler un bonhomme. | Le principe de cette épreuve est d'assembler un bonhomme. | ||
| − | Des pièces de différentes | + | Des pièces de différentes formes (main, pied, tête) seront disposées sur la piste, sur un présentoir. Il faudra aller chercher ces pièces et les assembler entre elles à un endroit précis sur la piste. |
<gallery> | <gallery> | ||
| Ligne 41 : | Ligne 44 : | ||
==Préparation du projet== | ==Préparation du projet== | ||
| − | ===Matériel | + | ===Matériel prêté par FESTO pour la compétition=== |
* Un Robotino | * Un Robotino | ||
* Une extension lève-palette | * Une extension lève-palette | ||
* Un hub usb pour pouvoir connecter plusieurs périphériques usb sur le Robotino | * Un hub usb pour pouvoir connecter plusieurs périphériques usb sur le Robotino | ||
| + | |||
| + | ===Matériel prêté par WorldSkills France=== | ||
| + | * 3 ordinateurs portables | ||
| + | |||
===Matériel à acheter ou fabriquer=== | ===Matériel à acheter ou fabriquer=== | ||
* Plots et palette pour '''Lost in the black forest ''' (fabriqués avec des matériaux de récupération) | * Plots et palette pour '''Lost in the black forest ''' (fabriqués avec des matériaux de récupération) | ||
| Ligne 50 : | Ligne 57 : | ||
* Extension au Robotino pour prendre les pièces de l'épreuves '''Made in Germany''' | * Extension au Robotino pour prendre les pièces de l'épreuves '''Made in Germany''' | ||
* 2 fois 2*4m de lino blanc pour réaliser les pistes des épreuves | * 2 fois 2*4m de lino blanc pour réaliser les pistes des épreuves | ||
| + | * 2 moteurs pour commander l'extension | ||
==Avancement du projet== | ==Avancement du projet== | ||
| Ligne 88 : | Ligne 96 : | ||
Depuis la dernière séance, nous avons reçu du matériel venant de FESTO. Nous avons reçu un lève-palette et un hub usb pour le robotino. Nous avons donc passé la séance à monter et câbler ce matériel sur le robot. | Depuis la dernière séance, nous avons reçu du matériel venant de FESTO. Nous avons reçu un lève-palette et un hub usb pour le robotino. Nous avons donc passé la séance à monter et câbler ce matériel sur le robot. | ||
| − | Voici comment nous avons connecté les capteurs sur les entrées sorties du robot: | + | Voici comment nous avons connecté les capteurs sur les entrées et sorties du robot (analogiques ou digitales): |
[[Fichier:CablageCapteurs.jpg|upright=3|thumb|center|Câblage des capteurs sur le robot]] | [[Fichier:CablageCapteurs.jpg|upright=3|thumb|center|Câblage des capteurs sur le robot]] | ||
| Ligne 97 : | Ligne 105 : | ||
De plus, à cause des problèmes rencontrés avec la NorthStar nous avons décidé de ne pas l'utiliser et d'utiliser l'odomètre déjà présent sur le robot pour les déplacements et nous ne disposerons pas de la NorthStar pour la compétition. | De plus, à cause des problèmes rencontrés avec la NorthStar nous avons décidé de ne pas l'utiliser et d'utiliser l'odomètre déjà présent sur le robot pour les déplacements et nous ne disposerons pas de la NorthStar pour la compétition. | ||
| − | L'odomètre nous permet de connaitre le position du robot. En fait, le robot est doté de roues codeuses qui lui permettent à l'aide de l'odomètre toujours | + | L'odomètre nous permet de connaitre le position du robot. En fait, le robot est doté de roues codeuses qui lui permettent à l'aide de l'odomètre de toujours connaître la position du robot. |
| − | Cependant, pour l'utiliser il faut être très précis lors de son initialisation, surtout au niveau de l'angle, une petite erreur au départ entraîne de gros | + | Cependant, pour l'utiliser il faut être très précis lors de son initialisation, surtout au niveau de l'angle, une petite erreur au départ entraîne de gros écarts en bout de piste. |
===Semaine 9=== | ===Semaine 9=== | ||
| Ligne 118 : | Ligne 126 : | ||
Cependant, en effectuant les mesures pour le cahier des charges, nous avons réaliser que la course de l'axe verticale est trop courte pour aller chercher certaines pièces. Il manque 5cm. | Cependant, en effectuant les mesures pour le cahier des charges, nous avons réaliser que la course de l'axe verticale est trop courte pour aller chercher certaines pièces. Il manque 5cm. | ||
| − | Nous avons chercher d'autres solutions sans l'axe verticale. Nous avons pensez utiliser ressemblant à une grue avec un axe verticale beaucoup plus grand et prendre les pièces par le haut dans le sens de l'épaisseur (la taille la plus petite). En prenant les pièces par le haut il est nécessaire d'avoir un axe beaucoup plus grand que prévu car nous ne pourrons pas empiler les pièces pour les déplacer. Nous sommes donc à la recherche de pince déjà faite. | + | Nous avons chercher d'autres solutions sans l'axe verticale. Nous avons pensez utiliser un système ressemblant à une grue avec un axe verticale beaucoup plus grand et prendre les pièces par le haut dans le sens de l'épaisseur (la taille la plus petite). En prenant les pièces par le haut il est nécessaire d'avoir un axe beaucoup plus grand que prévu car nous ne pourrons pas empiler les pièces pour les déplacer. Nous sommes donc à la recherche de pince déjà faite. |
| Ligne 126 : | Ligne 134 : | ||
De plus, n'ayant pas trouver de solutions à moindre coût pour réaliser les pièces de '''Made in Germany | De plus, n'ayant pas trouver de solutions à moindre coût pour réaliser les pièces de '''Made in Germany | ||
| − | nous avons | + | nous avons commencé a réaliser ces pièces en cartons en dehors des séances de projet. |
===Semaine 10=== | ===Semaine 10=== | ||
| Ligne 159 : | Ligne 167 : | ||
Nous avons réalisé la piste pour l'épreuve '''Lost in the Black Forest''' | Nous avons réalisé la piste pour l'épreuve '''Lost in the Black Forest''' | ||
durant cette séance. | durant cette séance. | ||
| − | Chaque petit carré de scotch noir est en réalité un plot. Nous en disposons seulement de 5 pour le moment un par taille possible. Les lignes | + | Chaque petit carré de scotch noir est en réalité un plot. Nous en disposons seulement de 5 pour le moment un par taille possible pour 48 positions sur la piste. Les lignes noirs devant les plots sont là pour guider le robot à bien se positionner devant (elle seront également là le jour de la compétition). |
| Ligne 176 : | Ligne 184 : | ||
'''Séance 13: 18/03/2013''' | '''Séance 13: 18/03/2013''' | ||
| − | Nous avons travaillé sur le correcteur PI que nous avions | + | Nous avons travaillé sur le correcteur PI que nous avions réalisé la semaine précedente. De plus, nous avons remarqué qu'il est possible de créer nos propre blocs en C++ pour RobotinoView. Nous pourrions ainsi faire un correcteur plus simplement. |
'''Séance 14: 20/03/2013''' | '''Séance 14: 20/03/2013''' | ||
| − | Nous avons travaillé à la réalisation de blocs de fonction pour RobotinoView. Nous avons | + | Nous avons travaillé à la réalisation de blocs de fonction pour RobotinoView. Nous avons rencontré beaucoup de difficultés à installer les API OpenRobotino sur Windows et les compiler. Après un problème sur la session windows d'un ordi personnel, nous avons également essayé sur Linux. Cela s'est avéré sans succès. |
| − | De plus, nous avons réfléchi au moyen de | + | De plus, nous avons réfléchi au moyen de parcourir toute la piste pour récupérer les palettes, sachant qu'on dispose de 9 palettes sur les 48 plots de la piste et que la hauteur de ces plots varie. Pour cela, nous avons choisi d'établir un parcours que fera le robot pour passer devant tous les plots un par un. |
L'objectif étant que lorsque le robot repère une palette, il l'a prenne et l'emmène dans la zone de départ puis retourne au parcours des plots sans passer par ceux qu'il a déjà vu. Ainsi le robot passera une seul fois devant chaque plot. Un deuxième parcours de la piste en fin d'épreuve pourra être prévu si toutes les palettes non pas été trouvée. | L'objectif étant que lorsque le robot repère une palette, il l'a prenne et l'emmène dans la zone de départ puis retourne au parcours des plots sans passer par ceux qu'il a déjà vu. Ainsi le robot passera une seul fois devant chaque plot. Un deuxième parcours de la piste en fin d'épreuve pourra être prévu si toutes les palettes non pas été trouvée. | ||
| − | Pour se faire nous avons choisi de diviser la piste en différentes zones, chaque zone est | + | Pour se faire nous avons choisi de diviser la piste en différentes zones, chaque zone est identifiée par un point centrale par lequel le robot pourra passer sans taper dans les plots. Toutes les positions des plots, ou plutôt la position du robot pour être placer juste devant seront noté dans un fichier excel pour pouvoir les retrouver facilement avec leur zone. Ainsi, en fonction de la zone dans laquelle se trouve le robot nous saurons par quels points passer pour aller dans la zone de départ et comment revenir ensuite. |
[[Fichier:MadeInTheBlackForestZone.jpg|upright=3|center|thumb|Voici les différentes zones sur le plan de la piste]] | [[Fichier:MadeInTheBlackForestZone.jpg|upright=3|center|thumb|Voici les différentes zones sur le plan de la piste]] | ||
| Ligne 203 : | Ligne 211 : | ||
'''Séance 16: 03/04/2013 | '''Séance 16: 03/04/2013 | ||
| − | Nous continuons nos | + | Nous continuons nos recherches sur la création de bloc pour RobotinoView. Il semblerait que nous devrions disposer avec l'API RobotinoView d'un logiciel permettant de créer des blocs appelé '''Function Block Manager |
, mais nous ne l'avons pas. L'API dont nous disposons serait-elle incomplète? | , mais nous ne l'avons pas. L'API dont nous disposons serait-elle incomplète? | ||
| Ligne 212 : | Ligne 220 : | ||
'''Séance 17: 04/04/2013 | '''Séance 17: 04/04/2013 | ||
| − | Nous travaillons | + | Nous travaillons à vérifier les méthodes d'asservissement utilisées avec les correcteurs P, PI, PD et PID. Certains ne fonctionnent pas correctement. |
===Semaine 15=== | ===Semaine 15=== | ||
| Ligne 231 : | Ligne 239 : | ||
Après plusieurs semaines de recherche sur la possibilité de créer des blocs pour le logiciel RobotinoView, nous avons enfin trouver la version complète de l'API RobotinoView nécessaire. Ce n'est pas celle proposé sur le [http://wiki.openrobotino.org/index.php?title=Main_Page RobotinoWiki]. Le lien correct est [http://doc.openrobotino.org/download/RobotinoView/robview2_api_current.php ici]. | Après plusieurs semaines de recherche sur la possibilité de créer des blocs pour le logiciel RobotinoView, nous avons enfin trouver la version complète de l'API RobotinoView nécessaire. Ce n'est pas celle proposé sur le [http://wiki.openrobotino.org/index.php?title=Main_Page RobotinoWiki]. Le lien correct est [http://doc.openrobotino.org/download/RobotinoView/robview2_api_current.php ici]. | ||
| − | Nous avons mis en place la nouvelle méthode de calcul d'intégrale pour le correcteur PI, tout n'est pas optimale. Il faut encore | + | Nous avons mis en place la nouvelle méthode de calcul d'intégrale pour le correcteur PI, tout n'est pas optimale. Il faut encore changer quelques paramètres au niveau du dérivateur. |
| Ligne 256 : | Ligne 264 : | ||
===Semaine 18=== | ===Semaine 18=== | ||
| − | Durant cette semaine, | + | Durant cette semaine, WorldSkills France organise une deuxième semaine de préparation physique et mentale à l'INSEP de Vincennes. Elle se déroule du 29 Avril au 5 Mai 2013. |
| + | |||
| + | Nous avons profité de cette semaine pour discuter avec les personnes en charge de la logistique. Ainsi, trois ordinateurs portables nous sont prêtés pour la compétition. Nous n'aurons pas à formater nos ordinateurs personnels. | ||
===Semaine 19=== | ===Semaine 19=== | ||
| Ligne 265 : | Ligne 275 : | ||
| − | '''Présentation oral du projet le 07/05/2013 | + | '''Présentation oral du projet le mardi 07/05/2013 |
===Reste à faire === | ===Reste à faire === | ||
| Ligne 274 : | Ligne 284 : | ||
==Problèmes rencontrés== | ==Problèmes rencontrés== | ||
| − | *La réalisation d'un prototype des pièces à déplacer, nous a posé problème. En effet, certaines sont trop grandes pour faite en impression 3D. Elles sont longues et | + | *La réalisation d'un prototype des pièces à déplacer, nous a posé problème. En effet, certaines sont trop grandes pour être faite en impression 3D. Elles sont longues et chères à réaliser en aluminium. Nous avons finalement décidé de les faire en cartons. |
*La création de l'extension nous a également posé problème car nous pensions utiliser l'axe vertical du lève-palette mais ça course est trop petite. Il faut donc fabriquer aussi cette partie. | *La création de l'extension nous a également posé problème car nous pensions utiliser l'axe vertical du lève-palette mais ça course est trop petite. Il faut donc fabriquer aussi cette partie. | ||
*Trouver la bonne API RobotinoView complète permettant de créer nos propres blocs de fonctions sur RobotinoView nous a pris beaucoup de temps et cela ne pourra finalement pas être utilisé lors de la compétition. | *Trouver la bonne API RobotinoView complète permettant de créer nos propres blocs de fonctions sur RobotinoView nous a pris beaucoup de temps et cela ne pourra finalement pas être utilisé lors de la compétition. | ||
*Le calcul d'intégrale que nous faisions sur RobotinoView n'était pas précis et engendrait des erreurs sur l'asservissement. Nous utiliserons principalement un régulateur proportionnel. | *Le calcul d'intégrale que nous faisions sur RobotinoView n'était pas précis et engendrait des erreurs sur l'asservissement. Nous utiliserons principalement un régulateur proportionnel. | ||
| − | *L'initialisation de l'odomètre robot est difficile à faire précisément à l'aide les capteurs, ce qui engendre des erreurs sur tous les déplacements. Il faut trouver le bon équilibre entre l'asservissement du robot et la précision voulu au niveau des capteurs pour ne pas osciller. | + | *L'initialisation de l'odomètre du robot est difficile à faire précisément à l'aide les capteurs, ce qui engendre des erreurs sur tous les déplacements. Il faut trouver le bon équilibre entre l'asservissement du robot et la précision voulu au niveau des capteurs pour ne pas osciller. |
==Bilan== | ==Bilan== | ||
| − | Nous avons durant ce projet préparé la <b>WorldSkills competition</b>. | + | Nous avons durant ce projet, préparé la <b>WorldSkills competition</b>. |
| − | Pour cela, nous avons | + | Pour cela, nous avons réalisé une copie des pistes de chaque épreuve et réaliser des prototypes en cartons des éléments à transporter. Nous avons mis au point les stratégies pour réaliser chaque épreuve. Et nous avons mis en place la stratégie trouvée pour réaliser l'épreuve <b>Lost In The Black Forest</b>. Pour l'épreuve <b>Made In Germany</b>, il reste à réaliser l'extension. |
==Rapport== | ==Rapport== | ||
| − | + | [[Média:Rapport_WorldSkills2012.pdf]] | |
| + | |||
| + | ==Résultats== | ||
| + | Nous avons finalement fini 16ème sur 19 avec 464 points sur 500. Le podium est composé des équipes de la Corée du Sud, de l'Iran et du Japon. | ||
| + | |||
| + | Les résultats détaillés sont disponible ici: [[Média:Resultat_WorldSkills2012.pdf]] | ||
Version actuelle datée du 28 janvier 2014 à 11:10
Sommaire
Présentation

Le but de ce projet est de se préparer pour les WorldSkills 2013 dans le métier de Robotique Mobile.
WorldSkills Competition
WorldSkills une compétition qui à lieu à Leipzig en Allemagne du 2 au 7 Juillet 2013. Cette compétition est connue en France sous le nom d'Olympiades des Métiers, la final nationale de la 42ème édition ayant eu lieu du 22 au 24 Novembre 2012 à Clermont-Ferrand. Cette année, un millier de jeunes concurrants du monde entiers vont s'affronter dans plus de 50 métiers à Leipzig en Allemagne. Pour plus d'information voici les liens vers les pages de WorldSkills France et WorldSkills International.
Robotique Mobile
Le compétition dans le métier de robotique mobile consiste à l'utilisation d'un robot nommé Robotino et fabriqué par l'entreprise FESTO. Elle se déroule en plusieurs épreuves.
En effet, nous devons programmer le robot pour qu'il effectue un parcours précis, aller chercher des pièces en évitant les obstacles et les poser ailleurs avec des parcours différents pour chaque épreuve. Pour les Worldskills, il faut généralement pour l'une des épreuves réaliser une extension au robot qui permet de manipuler les pièces.
Objectif: WorldSkills 2013
La compétition se déroule en deux épreuves:
- Lost in the black forest
Le principe de cette épreuve est d'aller chercher les enfants dans les arbres pour les emmener à l'école.
Les enfants seront représentés par des figurines de types Fisher Prices. Les arbres sont représentés par des plots de différentes hauteurs et l'école par une zone de couleur sur la piste. Les enfants seront mis sur une palette dans certains arbres. Il faudra aller chercher toutes les palettes et les emmener à l'école sans faire tomber les enfants qui sont dessus. L'école est également le point de départ du robot.

La piste de l'épreuve Lost In The Black Forest

Les enfants sont tous arrivés à l'école


Voici le sujet complet de l'épreuve: Média:LostInTheBlackForest.pdf
- Made in Germany
Le principe de cette épreuve est d'assembler un bonhomme.
Des pièces de différentes formes (main, pied, tête) seront disposées sur la piste, sur un présentoir. Il faudra aller chercher ces pièces et les assembler entre elles à un endroit précis sur la piste.

La piste de l'épreuve Made In Germany
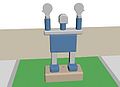
Les pièces une fois assemblées


Voici le sujet complet de l'épreuve: Média:MadeInGermany.pdf
Préparation du projet
Matériel prêté par FESTO pour la compétition
- Un Robotino
- Une extension lève-palette
- Un hub usb pour pouvoir connecter plusieurs périphériques usb sur le Robotino
Matériel prêté par WorldSkills France
- 3 ordinateurs portables
Matériel à acheter ou fabriquer
- Plots et palette pour Lost in the black forest (fabriqués avec des matériaux de récupération)
- Pièces de l'épreuve Made in Germany (frabriquées avec des matériaux de récupération)
- Extension au Robotino pour prendre les pièces de l'épreuves Made in Germany
- 2 fois 2*4m de lino blanc pour réaliser les pistes des épreuves
- 2 moteurs pour commander l'extension
Avancement du projet
Semaine 6
Séance 1: 04/02/2013
Durant cette séance nous avons identifier le matériel nécessaire et les réalisations à effectuer pour la réalisations du projet. Nous avons identifier les besoins suivants:
Lost in the black forest
- Utilisation du lève-palette pour aller chercher les enfants.
- Pour s'entraîner: fabrication des plots et lève-palette.
Made in Germany
- Fabrication d'une extension pour manipuler les pièces et les assembler.
- Fabrication des pièces pour tester la réalisation finale.
Séance 2: 07/02/2013
Durant cette séance, nous sommes allez voir les professeurs du département mécanique pour avoir des conseils sur les matériaux à utiliser pour réaliser les pièces manquantes et sur la manière de les faire.
Semaine 7
Séance 3: 11/02/2013
Lors de cette séance nous avons testé l’extension du Robotino NorthStar. Nous avons eu quelques problèmes d'initialisation et de précision. En effet, pour un déplacement de 3m, la NorthStar indique un déplacement de 1m.
A faire lors de la prochaine séance:
Rechercher sur internet plus informations sur la NorthStar. Il est indiqué dans la doc technique une précision de 5cm pour un déplacement de 1m.
Continuer la réflexion sur les solutions techniques pour réaliser l'extension.
Séance 4: 14/02/2013
Depuis la dernière séance, nous avons reçu du matériel venant de FESTO. Nous avons reçu un lève-palette et un hub usb pour le robotino. Nous avons donc passé la séance à monter et câbler ce matériel sur le robot.
Voici comment nous avons connecté les capteurs sur les entrées et sorties du robot (analogiques ou digitales):


Nous avons également fait des essais d'asservissement en position du lève-palette.
De plus, à cause des problèmes rencontrés avec la NorthStar nous avons décidé de ne pas l'utiliser et d'utiliser l'odomètre déjà présent sur le robot pour les déplacements et nous ne disposerons pas de la NorthStar pour la compétition.
L'odomètre nous permet de connaitre le position du robot. En fait, le robot est doté de roues codeuses qui lui permettent à l'aide de l'odomètre de toujours connaître la position du robot.
Cependant, pour l'utiliser il faut être très précis lors de son initialisation, surtout au niveau de l'angle, une petite erreur au départ entraîne de gros écarts en bout de piste.
Semaine 9
Séance 5: 25/02/2013
Depuis la dernière séance l'asservissement du lève-palette en hauteur à été fait avec un correcteur PD.
Durant cette séance nous avons réfléchi aux solutions techniques pour réaliser le bras permettant de prendre les pièces. Pour prendre les pièces le bras doit avoir un mouvement verticale, pour se positionner à la hauteur de la pièce et un mouvement horizontale avec une pince pour la prendre par l'avant. Les autres mouvements pour se placer en face de la pièce seront fait par le Robotino.
Nous avons également pris rendez-vous avec un professeur de Mécanique M. Dienne pour le Mercredi 27/02 à 14h.
Séance 6: 27/02/2013
Nous avons vu M. Dienne pour discuter des solutions techniques pour la réalisation de l'extension. Nous pensons utiliser l'axe vertical du lève-palette pour faire le mouvement verticale nécessaire et adapter une pince dessus pour prendre les pièces par l'avant.
Cependant, en effectuant les mesures pour le cahier des charges, nous avons réaliser que la course de l'axe verticale est trop courte pour aller chercher certaines pièces. Il manque 5cm. Nous avons chercher d'autres solutions sans l'axe verticale. Nous avons pensez utiliser un système ressemblant à une grue avec un axe verticale beaucoup plus grand et prendre les pièces par le haut dans le sens de l'épaisseur (la taille la plus petite). En prenant les pièces par le haut il est nécessaire d'avoir un axe beaucoup plus grand que prévu car nous ne pourrons pas empiler les pièces pour les déplacer. Nous sommes donc à la recherche de pince déjà faite.
Séance 7: 28/02/2013
Nous avons chercher des systèmes de pince pouvant prendre des pièces de 15 à 150 mm.
De plus, n'ayant pas trouver de solutions à moindre coût pour réaliser les pièces de Made in Germany nous avons commencé a réaliser ces pièces en cartons en dehors des séances de projet.
Semaine 10
Séance 8: 04/03/2013
Nous avons à nouveau rencontré le professeur de mécanique afin de réfléchir à une solution sans l'axe verticale disponible sur le robot. Finalement le système de pince restera celui prévu avec un système de vis à bille. L'axe verticale sera également réalisé avec un système de vis à bille.
Séance 9: 06/03/2013
Durant cette séance, nous avons mesuré et fait le schéma de l'espace disponible sur le robot pour placer l'extension, cette partie est nécessaire à la réalisation mécanique.

Schéma de la partie basse

Schéma de la partie arrière


Nous avons également asservi le lève palette à l'aide de la caméra. En effet, pour l'épreuve Lost in the black forest
les palettes seront disposées à des hauteurs différentes, il faut donc pouvoir s'adapter à la hauteur. La palette étant de couleur rouge ou bleu et les supports de couleur noir, il est possible de détecter les palettes à l'aide de la caméra. En mettant la caméra sur le lève-palette, la distance entre la caméra et la palette est identique quelque soit la hauteur lorsque le lève-palette est prêt à prendre la palette.
Séance 10: 07/03/2013
Nous avons effectué une recherche bibliographique des systèmes de vis à bille durant cette séance, pour la réalisation de la partie mécanique.

Semaine 11
Séance 11: 11/03/2013
Nous avons réalisé la piste pour l'épreuve Lost in the Black Forest durant cette séance. Chaque petit carré de scotch noir est en réalité un plot. Nous en disposons seulement de 5 pour le moment un par taille possible pour 48 positions sur la piste. Les lignes noirs devant les plots sont là pour guider le robot à bien se positionner devant (elle seront également là le jour de la compétition).
Séance 12: 13/03/2013

Dans le cadre de la préparation à la compétition, nous devions participer à la finale national des Pays-Bas durant cette semaine. Les Master Skills de Rotterdam se déroulant du 15 au 17 Mars 2013. Cependant, à cause de la tempête de neige qui a sévit sur le nord de l'europe, nous n'avons pas pu partir. Cela ne remet pas en cause notre participation aux Worldskills.
Durant cette séance nous avons travaillé sur l'initialisation du Robotino. En effet, pour diriger le robot dans l'espace nous dispons d'un Odomètre. Cependant, la position du robot à l'initialisation doit être précise et surtout toujours la même. Pour faire cette initialisation, nous avons choisi d'utiliser les capteurs afin de se positionner dans un angle de la piste.
Nous avons donc choisi d'utiliser les capteurs 5 et 6 afin de se positionner perpandiculèrement au mur arrière et le capteur 3 pour se mettre à une distance connu du mur gauche. En effet, lorsque la valeur des deux capteurs 5 et 6 est identique le robot est bien perpandiculaire au mur. De plus, nous avons utilisé un correcteur PI afin d'être plus précis.
Semaine 12
Séance 13: 18/03/2013
Nous avons travaillé sur le correcteur PI que nous avions réalisé la semaine précedente. De plus, nous avons remarqué qu'il est possible de créer nos propre blocs en C++ pour RobotinoView. Nous pourrions ainsi faire un correcteur plus simplement.
Séance 14: 20/03/2013
Nous avons travaillé à la réalisation de blocs de fonction pour RobotinoView. Nous avons rencontré beaucoup de difficultés à installer les API OpenRobotino sur Windows et les compiler. Après un problème sur la session windows d'un ordi personnel, nous avons également essayé sur Linux. Cela s'est avéré sans succès.
De plus, nous avons réfléchi au moyen de parcourir toute la piste pour récupérer les palettes, sachant qu'on dispose de 9 palettes sur les 48 plots de la piste et que la hauteur de ces plots varie. Pour cela, nous avons choisi d'établir un parcours que fera le robot pour passer devant tous les plots un par un. L'objectif étant que lorsque le robot repère une palette, il l'a prenne et l'emmène dans la zone de départ puis retourne au parcours des plots sans passer par ceux qu'il a déjà vu. Ainsi le robot passera une seul fois devant chaque plot. Un deuxième parcours de la piste en fin d'épreuve pourra être prévu si toutes les palettes non pas été trouvée.
Pour se faire nous avons choisi de diviser la piste en différentes zones, chaque zone est identifiée par un point centrale par lequel le robot pourra passer sans taper dans les plots. Toutes les positions des plots, ou plutôt la position du robot pour être placer juste devant seront noté dans un fichier excel pour pouvoir les retrouver facilement avec leur zone. Ainsi, en fonction de la zone dans laquelle se trouve le robot nous saurons par quels points passer pour aller dans la zone de départ et comment revenir ensuite.

Séance 15: 21/03/2013
Nous avons continué à travailler sur les blocs de fonction et sur la localisation des blocs pour les déplacements du robots.
Semaine 13
Durant cette semaine, l'organisation française des Olympiades des métiers organise une semaine de préparation physique et mentale à l'INSEP de Vincennes. Elle se déroule du 25 au 29 Mars 2013.
Semaine 14
Séance 16: 03/04/2013
Nous continuons nos recherches sur la création de bloc pour RobotinoView. Il semblerait que nous devrions disposer avec l'API RobotinoView d'un logiciel permettant de créer des blocs appelé Function Block Manager , mais nous ne l'avons pas. L'API dont nous disposons serait-elle incomplète?
Nous avons travaillé sur l'initialisation du robot, nous avons finalement choisi d'avancer jusqu'à la ligne de la zone de départ, de suivre le ligne jusqu'au mur droit et de s'orienter par rapport au mur droit. De cette manière la position en x et y du robot est plus précise.
Séance 17: 04/04/2013
Nous travaillons à vérifier les méthodes d'asservissement utilisées avec les correcteurs P, PI, PD et PID. Certains ne fonctionnent pas correctement.
Semaine 15
Séance 18: 08/04/2013
En plus, de ne pas avoir l'application Function Block Manager , il nous manque des librairies pour pouvoir compiler correctement les fichiers de test fourni.
Les tests des fonctions utilisées pour asservir le robot ont montré que la manière dont est calculé l'intégrale est fausse. Il a fallut durant cette séance trouver une autre méthode de calcul d'une intégrale de façon discrète.
A faire lors des prochaines séances:
Trouver la version complète de l'API RobotinoView
Séance 19: 10/04/2013
Après plusieurs semaines de recherche sur la possibilité de créer des blocs pour le logiciel RobotinoView, nous avons enfin trouver la version complète de l'API RobotinoView nécessaire. Ce n'est pas celle proposé sur le RobotinoWiki. Le lien correct est ici.
Nous avons mis en place la nouvelle méthode de calcul d'intégrale pour le correcteur PI, tout n'est pas optimale. Il faut encore changer quelques paramètres au niveau du dérivateur.
Séance 20: 11/04/2013
Nous avons continué les tests d'asservissement du robot. Il semble fonctionner. Cependant, la création d'un bloc fesant le fonction de régulateur nous permettrait d'avoir un calcul d'intégrale plus précis.
Semaine 17
Nous avons profité de cette deuxième semaine de vacances pour travailler sur le projet.
Nous avons:
- réalisé une partie du parcours pour l'épreuve Lost In The Black Forest
- passage devant chaque plot
- détection des palettes (à l'aide de la caméra)
- récupération et acheminement de la palette dans la zone de départ
- retour au passage devant les plots restant pour détecter les autres palettes
- filmé les séquences nécessaire au montage de la vidéo.
- travaillé sur le rapport et la présentation oral du projet.
De plus, nous avons appris que lors de la compétition certes nous disposerons de nos ordinateurs personnels pour éviter les problèmes de langue et de clavier mais devrons les formater juste avant la compétition et avoir dessus seulement RobotinoView. Il sera donc imposible d'utiliser des blocs de fonctions écrit par nous même en C++.
La préparation de l'épreuve Made In Germany n'avance pas beaucoup. En effet, nous travaillons en collaboration avec les professeurs du département mécanique et depuis un mois, entre les vacances et les déplacements de chacun, nous ne sommes jamais disponible en même temps.
Semaine 18
Durant cette semaine, WorldSkills France organise une deuxième semaine de préparation physique et mentale à l'INSEP de Vincennes. Elle se déroule du 29 Avril au 5 Mai 2013.
Nous avons profité de cette semaine pour discuter avec les personnes en charge de la logistique. Ainsi, trois ordinateurs portables nous sont prêtés pour la compétition. Nous n'aurons pas à formater nos ordinateurs personnels.
Semaine 19
Nous avons durant cette semaine réalisé la piste de l'épreuve Made In Germany.

Présentation oral du projet le mardi 07/05/2013
Reste à faire
- Finir les pièces de Made in Germany
- Réaliser l'extension
- Tester l'extension
Problèmes rencontrés
- La réalisation d'un prototype des pièces à déplacer, nous a posé problème. En effet, certaines sont trop grandes pour être faite en impression 3D. Elles sont longues et chères à réaliser en aluminium. Nous avons finalement décidé de les faire en cartons.
- La création de l'extension nous a également posé problème car nous pensions utiliser l'axe vertical du lève-palette mais ça course est trop petite. Il faut donc fabriquer aussi cette partie.
- Trouver la bonne API RobotinoView complète permettant de créer nos propres blocs de fonctions sur RobotinoView nous a pris beaucoup de temps et cela ne pourra finalement pas être utilisé lors de la compétition.
- Le calcul d'intégrale que nous faisions sur RobotinoView n'était pas précis et engendrait des erreurs sur l'asservissement. Nous utiliserons principalement un régulateur proportionnel.
- L'initialisation de l'odomètre du robot est difficile à faire précisément à l'aide les capteurs, ce qui engendre des erreurs sur tous les déplacements. Il faut trouver le bon équilibre entre l'asservissement du robot et la précision voulu au niveau des capteurs pour ne pas osciller.
Bilan
Nous avons durant ce projet, préparé la WorldSkills competition.
Pour cela, nous avons réalisé une copie des pistes de chaque épreuve et réaliser des prototypes en cartons des éléments à transporter. Nous avons mis au point les stratégies pour réaliser chaque épreuve. Et nous avons mis en place la stratégie trouvée pour réaliser l'épreuve Lost In The Black Forest. Pour l'épreuve Made In Germany, il reste à réaliser l'extension.
Rapport
Média:Rapport_WorldSkills2012.pdf
Résultats
Nous avons finalement fini 16ème sur 19 avec 464 points sur 500. Le podium est composé des équipes de la Corée du Sud, de l'Iran et du Japon.
Les résultats détaillés sont disponible ici: Média:Resultat_WorldSkills2012.pdf