IMA4 2016/2017 P25 Robot mobile
Sommaire
Cahier des charges
Objectif
Le but est concevoir un robot mobile à partir d'éléments de base. Les parties à réaliser sont le châssis hors moteurs et la carte électronique à base d'ATMega328p.
Description du projet
Partir du stage de l'an passé concernant la plateforme robotique pour l'enseignement secondaire et le finaliser. Les modifications à apporter sont au niveau de :
- La carte principale.
- La version à base d'ATmega traversant, et réalisée dans le cadre du stage de l'an dernier, est presque fonctionnelle. Elle nécessite cependant quelques changements: lier les LEDs à une tension VCC=5V au lieu de la masse, changer la capacité des condensateurs du quartz à 22 pF, changer l'emplacement de quelques composants, tel que le quartz, qui doit être éloigné du convertisseur afin d'éviter les perturbations causées par ce dernier, tout en étant proche du µC. De même que pour les capacités de découplage qui doivent être proche du μC.
- La version à base d'ATmega CMS, faite dans le cadre du projet [1], ne fonctionne pas, peut-être à cause du quartz qui s'avère difficile à souder.
- Du châssis: concevoir un châssis qui arrive à porter les deux types de motorisation : moto-réducteur d'entrée de gamme et moto-réducteur de qualité correcte.
- De la carte moteur : relier les deux plans de masse.
- De la carte suiveur de ligne : vérifier sa performance, prévoir son positionnement sur le chassis.
- Des piles : à mettre au dessous du châssis.
- La carte ultrason : concevoir une carte électronique avec des capteurs ultrason plus performants que sur les capteurs d'entrée de gamme du commerce. Réaliser le schématique et le PCB avec le logiciel Fritzing.
- Retour de vitesse : implanter un capteur de vitesse sur toutes les motorisations.
Choix techniques:matériel et logiciel
Après le premier rendez-vous avec notre encadrant, nous avons établi une première liste non exhaustive des composants que nous utiliserons.
- Le logiciel qui sera utilisé est Fritzing. Pour la conception du châssis, on prévoit utiliser Onshape
- Châssis : Plexiglas, moteur-réducteur ;
- Cartes électroniques : résistances, capteurs optiques, amplificateurs, connecteurs RJ11.
- Capteurs ultrason
- Capteurs Vitesse: Encodeurs incrémentaux
Liste des tâches
- Effectuer les modifications nécessaires sur la carte ATmega traversant et faire l'essai
- Changement des LEDs, capacités..
- Diagnostique des problèmes de la carte ATmega CMS en faisant des essais
- Soudage du quartz
- Proposer un modèle du châssis et faire une simulation sur Onshape
- Vérifier la carte moteur et faire des modifications jugées nécessaires
- Essais sur la carte suiveur de ligne
- Pour la carte ultrason, cette partie est la plus compliquée et qui prend le plus du temps, il faut faire le schématique et le PCB de nouveau, ainsi que changer les capteurs ultrasons
- Intégrer des capteurs vitesse pour avoir un retour sur les motorisations
Calendrier Prévisionnel
- 10H: Prise en main du logiciel Fritzing
- 20H sur la carte ultrason
- 10H: Réparation et simulation de la carte principale
Feuille d'heures
| Tâche | Prélude | Heures S1 | Heures S2 | Heures S3 | Heures S4 | Heures S5 | Heures S6 | Heures S7 | Heures S8 | Heures S9 | Heures S10 | Total |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Cahier des charges | 1H |
Carte Principale
Etat d'avancement du projet
Semaine 1
Cette semaine fut entièrement consacrée à la prise en main des différents logiciels nécessaire à l'aboutissement du projet. Nous avons aussi repris les traveaux sur l'Atmega traversant et apportés les modifications explicités dans le cahier des charges. Nos modifications ont abouti aux schématique et PCB ci dessous:
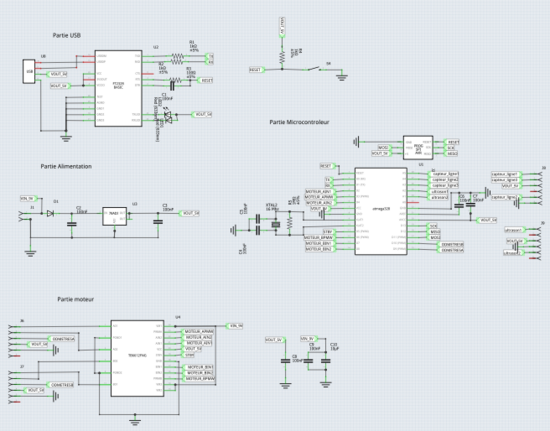
Fig.1:Schématique
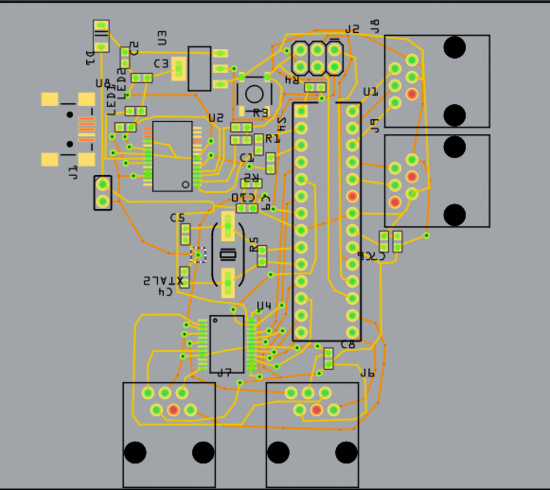
Fig.2:PCB


Semaine 2
Phase préparatoire
Vendredi 16/12/16 - Rendez-vous avec M.Redon pour la présentation du projet et la définition du cahier des charges .