Projet IMA3 P7, 2015/2016, TD1
Projet IMA3-SC 2015/2016 : Détecteur de luminosité rotatif
Cahier des charges
Contexte
Lors de l'installation de panneaux photo-voltaïques, il est important de rentabiliser au plus vite l'investissement. Trouver la direction ou la luminosité est la plus prononcée permettrait de réaliser ceci.
Objectif du projet
Le but est d'équiper un appareil commandé par un moteur à l'aide d'informations transmise par des photo-transistor afin de capter la direction où la luminosité est maximale.
Description du projet
Un bras fixe sera entraîné par un moteur où sera fixé 3 photo-transistors connecté à un FPGA contrôlant le moteur, ainsi nous devrons réaliser une interface Web qui nous permettra de choisir si l'on veut que le déplacement du bras soit automatique ou géré par commande numérique.
Une application Web doit être réalisée sur un système embarqué de type Raspberry Pi pour contrôler le bras et afficher la valeur de la luminosité que les capteurs reçoivent.
Matériel
- 3 photo-transistors
- Un moteur
- Un bras fixe
- Une NanoBoard
- Une carte Raspberry Pi
Étapes du projet
- Réaliser le bras fixe et fixer les photo-transistors
- Réaliser l'application Web codée en HTML5 et CSS et pour la partie dynamique, le Javascript et le PHP
- Programmer la carte Raspberry Pi
Séance 1
Partie électronique
Durant cette première séance de projet, nous avons pu prendre connaissance de tous les composants que nous allons utiliser par la suite. Cependant, notre projet initial a été changé. Nous n'allons plus utiliser de photo transistor mais un panneau solaire où nous allons détecter la maximum de tension grâce à une rotation totale initiale lors du lancement du programme. Cette position sera sauvegardé et la deuxième phase sera de retourner à cette position et de suivre un déplacement ( comme si l'on voulait suivre le déplacement du soleil, il est donc connu à l'avance ) lorsque la tension baisse.
Nous avons donc commencé à étudier sur le servomoteur. Nous avons regardé la datasheet pour comprendre comment câbler le servomoteur. Lors de la fin de la séance, nous avons travaillé sur le panneau photo-voltaïque et plus exactement sur la tension qu'il délivre selon la luminosité qu'il reçoit.
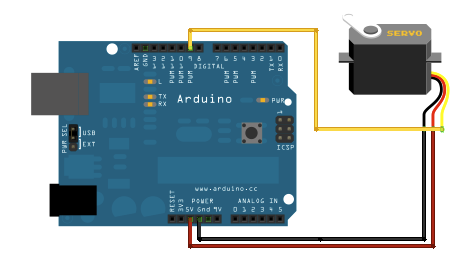

Partie informatique
Nous avons programmé une carte Arduino pour un servomoteur. A l'aide du programme, nous essayons de récuperer les données concernant l'angle de rotation qu'il effectue, dans l'optique de trouver une concordance entre l'angle de rotation et la tension maximale aux bornes du panneau photovoltaique.
Programme Arduino :
#include <Servo.h>
int pos =0;
void setup(void)
{
myservo.attach(9);
Serial.begin(9600);
}
void loop(void)
{
for (pos = 0;pos <= 180; pos +=1)
{
myservo.write(pos);
Serial.print(" position = ");
Serial.print(pos);
delay(15);
}
for (pos = 180; pos >= 0; pos -= 1)
{
myservo.write(pos);
Serial.print(" position = " );
Serial.print(pos);
delay(15);
}
}
Séance 2
Partie électronique
Lors de cette seconde séance de projet, nous avons suivi le tutoriel pour réaliser un programme FPGA sur Altium puis nous l'avons implémenté sur la nanoboard. Ensuite, nous avons effectué un test pour voir ce qu'il y avait aux bornes du servomoteur. Puis nous avons commencé notre partie sur le logiciel Altium designer, c'est-à-dire la programmation du servomoteur et plus exactement la création d'un signal PWM à brancher sur la PIN9.
Partie informatique
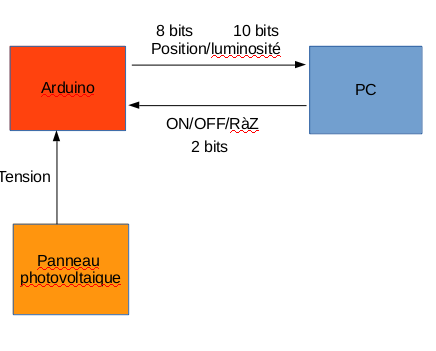
Voici la maquette des échanges entre les 3 parties de notre projet, qui est le PC, l'arduino et le panneau photovoltaique où nous avons analysé les bits nécéssaires à chaque message.

Nous avons aussi réussi à réaliser notre programme Arduino afin de récupérer en plus de la position du panneau photovoltaique (Cf séance 1) une valeur de tension à l'aide d'un montage diviseur de tension en sortie du panneau photovoltaique
#include <Servo.h>
int pos =0;
int sensorValue;
float vout =0.0;
float tension = 0.0;
float R1 = 8200;
float R2 = 2200;
Servo myservo;
void setup(void)
{
myservo.attach(9);
Serial.begin(9600);
}
void loop(void)
{
for (pos = 0;pos <= 180; pos +=1)
{
myservo.write(pos);
Serial.print(" position = ");
Serial.println(pos);
sensorValue = analogRead(A1);
vout = (sensorValue * 5.0) / 1024.0;
tension = vout / (R2/(R1+R2));
Serial.println(tension);
delay(200);
}
for (pos = 180; pos >= 0; pos -= 1)
{
myservo.write(pos);
Serial.print(" position = " );
Serial.println(pos);
sensorValue = analogRead(A1);
vout = (sensorValue * 5.0) / 1024.0;
tension = vout / (R2/(R1+R2));
Serial.println(tension);
delay(200);
}
}