Chauffage Polytech'Lille : Différence entre versions
| Ligne 1 : | Ligne 1 : | ||
| − | <include nopre noesc src="/home/pedago/pimasc/include/video- | + | <include nopre noesc src="/home/pedago/pimasc/include/video-ChauffagePolytechLille-iframe.html" /> |
__TOC__ | __TOC__ | ||
<br style="clear: both;"> | <br style="clear: both;"> | ||
Version actuelle datée du 14 juin 2014 à 16:36
Sommaire
Sujet : Gestion Intelligente des flux thermiques du bâtiment Polytech.
Contexte :
Le projet proposé par Mr. Belkacem Ould Bouamama est conçu pour le développement durable et initié par la direction de Polytech et est relié à cette problématique. C’est un projet à long termes, sa durée est de trois années. Son but est la mise en place d’une plateforme intelligente pour la régulation à distance et optimale des flux thermiques des radiateurs installés à Polytech. En d’autres termes, l’automatisation de ces radiateurs. Pour être plus précis, il va falloir changer les vannes manuelles par des vannes électriques commandables. Ainsi, l’utilisateur n’aura qu’à rentrer la consigne de température souhaitée, la commande se chargera du reste, à savoir, régler l’ouverture de la vanne en prenant en compte les contraintes de l’environnement et en minimisant les pertes. Notre objectif cette année, est d’étudier la faisabilité du projet.
Matériel :
-Logiciel Matlab.
-Électrovanne.
-Capteur de Température.
-Radiateur
Objectifs :
- Régler la température des radiateurs d’une salle de Polytech en agissant sur le débit de l'eau chaude arrivant de la chaudière.
- Sous format Automatique
- Sous format Manuel (dans le cas où le système automatique serait en panne)
- Limiter les pertes d’énergie liées à la mauvaise utilisation des radiateurs ou aux utilisations inutiles (ex : laisser le chauffage allumer pendant que les salles sont vides)
- Utiliser une plateforme intelligente qui sera commandée à distance pour la régulation de ces flux thermiques (tablettes, i phone, androïde…)
Contraintes :
- Température extérieure instantanée.
- Température de la salle.
- Les différentes données de températures fournies par Météo France (pour les prévisions).
- Emploi du temps de la salle (Afin d’éteindre le radiateur si la salle est libérée ou de préchauffer la salle le temps nécessaire pour atteindre la température voulue à l’instant voulu).
- Calendrier des saisons (Les radiateurs ne sont pas utilisés de la même manière toute l’année)
- Pression (Capteur de pression qui détectera une chute de pression brusque dans le cas où la fenêtre s’ouvre è éteindre le radiateur).
Étapes à suivre :
- Bien connaître le fonctionnement existant du système des radiateurs dans les locaux de Polytech.
- Utiliser la notion de la commande floue pour la commande de l’électrovanne.
- Faire un choix du type d'électrovanne compatible au système: TOR ou proportionnelle.
- Concevoir le système avec les électrovannes (TOR ou proportionnelles).
- Simuler le système sur Matlab.
- Tester sur une des salles de Polytech.
Voici le schéma complet de notre système:

Étapes importantes :
1/ Récupération des schémas de la disposition des radiateurs à Polytech. (de chez Mr ; Goudout).
2/ Visite général du local ou se fait distribution de l'eau chaude provenant de la chaudière dans les différents locaux de Polytech.
3/ Contact des constructeurs d'électrovannes :
-explication détaillée du projet.
-demande d'étude du projet.
-demande de devis.
4/ étude des solutions proposées.
5/ Commande flou + simulation sur logiciel.
Avancement du projet :
Semaine 1:
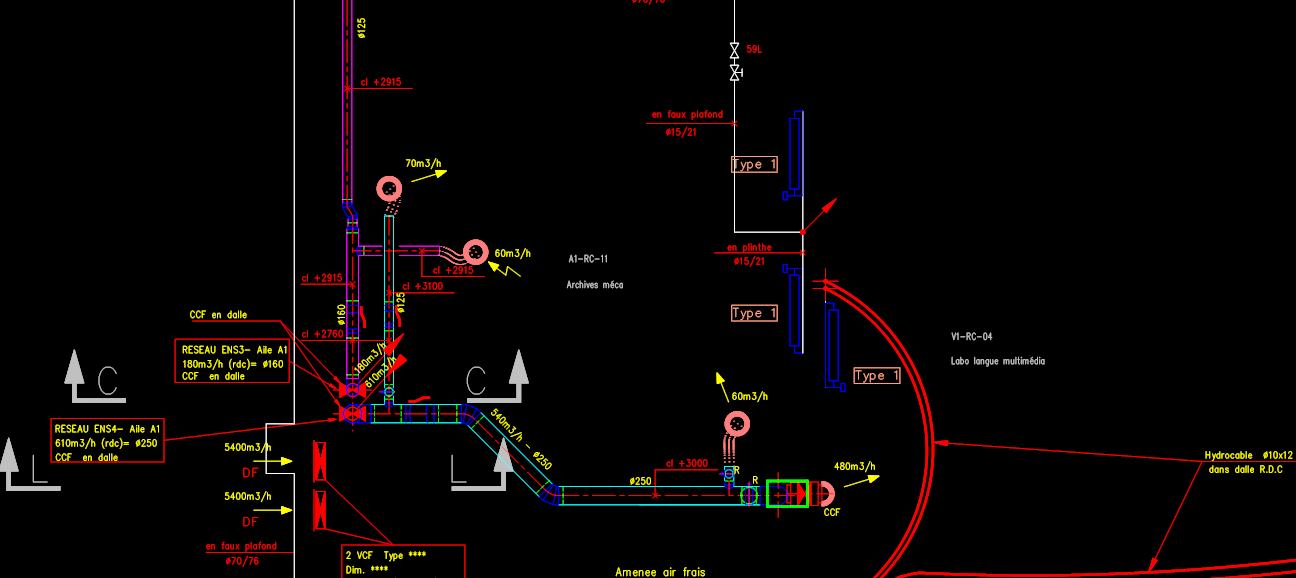
Durant les séances de cette semaine, nous avons bien étudié le contexte du projet. Nous somme allé voir Mr. Gaudout, le chef des services techniques, qui nous a fait une visite complète de l’atelier où se font toutes les distributions d’eau chaude provenant de la chaudière (se situant à Cité Scientifique). Ce dernier nous a bien expliqué le principe de fonctionnement en nous donnant un schéma d’exemple de distribution dont voici un extrait :

Semaine 2 :
Nous avons conçu le schéma global du système :
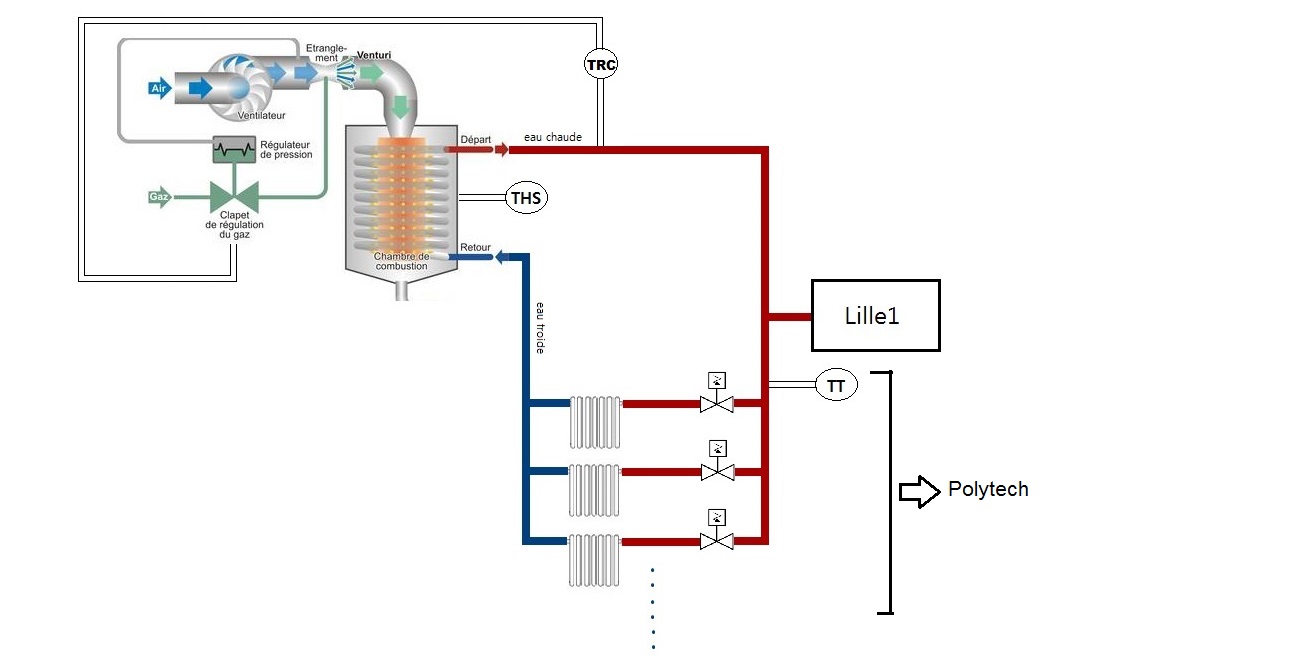

La chaudière de l’université Lille 1 est une chaudière alimentée par un gaz qui est brûlé dans une chambre de combustion. Cette opération produit des fumées très chaudes qui sont expulsées vers un échangeur où circule le fluide (de l’eau). L’eau circule à son tour dans le circuit de chauffage de l’habitation pour y diffuser la chaleur produite par la chaudière. Celle –ci ne dépasse pas une température d’eau en sortie de 80°C. L’eau rentre chaude dans les radiateurs et en sort froide pour retourner à la chaudière pour être réchauffé une seconde fois et retransmis aux radiateurs. C’est ainsi que le cycle se forme.
Semaine 3 :
Cette semaine a été entièrement consacré au Bond Graph et à son analyse. Le Bond graph est un langage unifié pour tous les domaines des sciences de l’ingénieur. Il représente graphiquement un système dynamique physique. Cet outil repose essentiellement sur la caractérisation des phénomènes d’échanges d’énergie au sein du système. Voici le BG de notre système pour le cas d’une seule salle :

La modélisation BD n’a pas été facile, il nous a fallu du temps pour revoir le principe et l’assimiler clairement. Nous avons modélisé plusieurs faux Bond Graphs avant celui-ci.
Semaine 4 et 5 :
Durant ces deux semaines, nous avons contacté les différents constructeurs se trouvant à Lille ou autres villes.
• Le constructeur NORGREN, qui est un leader mondial dans les technologies de contrôle de mouvements et des fluides, nous a affirmé que leur société était d’avantage orienté vers le pneumatique et qu’il fallait donc que nous contactions un spécialiste de régulation thermique. • Un agent technico-commercial chez DANFOSS qui est un producteur mondial de composants pour le conditionnement d'air, le chauffage et la gestion de l'eau, et des contrôles industriels, nous a répondu que le groupe ne proposait aucune électrovanne qui puisse répondre à notre demande.
• Plusieurs autres constructeurs nous ont affirmé qu’ils ne peuvent donner suite à notre demande car ce sont des constructeurs et non des bureaux d’études.
• ENEOVE, revendeur par internet, nous a proposé une solution non adéquate à notre système.
• Seul FESTO s’est réellement intéressé et a voulu suivre notre projet.
Semaine 6 et 7 :
Festo est une grande entreprise, son catalogue contient des centaines de types d’électrovannes différents. Il a donc fallu étudier celles qui paraissaient les plus adéquates au système.
•Les électrovannes tout ou rien. Ce type à deux états possibles :
-Entièrement fermée
-Entièrement ouverte
Avantages : Pas cher, commande facile.
Inconvénient : Pas de précision.
Solution possible : Mettre 3 électrovannes TOR en parallèle pour avoir l’équivalent d’une électrovanne proportionnelle.
Inconvénient de la solution :Trois électrovannes TOR couteraient plus cher qu’une seule électrovanne proportionnelle, de plus, l’installation et la commande seront compliquées.
•Les électrovannes proportionnelles :
Lorsqu'elle est fermée, le fluide entrant affiche une pression de p1 ; le plongeur (3) a coulissé et appuie donc sur le siège du pilote (4). Cette action, associée à la pression exercée par le ressort sur le piston (2), conduit à fermer le siège principal (5). un limiteur (6) permet au fluide de pénétrer dans la chambre de contrôle (1) et d'exercer une pression px par le haut sur la membrane d'étanchéité.
Si le limiteur, le siège du pilote et les rapports de surface de la phase principale sont dimensionnés en conséquence, les forces de compression sur le piston atteignent l'équilibre lorsque le siège est ouvert dans une certaine position. Avec une commande de pilote proportionnel, le piston suit, en principe, le mouvement axial continu du plongeur en fonction de la valeur qui génère cet équilibre.
•Les mélangeurs (Vannes à trois voies) :
Le principe de fonctionnement de la vanne trois voies est de mélanger à l’eau du départ du générateur (1), une certaine quantité d’eau du retour (3) du circuit de chauffage.
L’inconvénient de cette solution est qu’il va falloir refaire toute l’installation des radiateurs dans les locaux de Polytech car actuellement, les vannes des radiateurs sont à une voie seulement.
Conclusion : Solution coûteuse.
•Les vannes thermostatiques Les vannes thermostatiques abritent une sonde thermosensible qui se dilate et se contracte en fonction de la température ambiante et qui actionne un système mécanique qui laisse passer plus ou moins de fluide.
Principe de Fonctionnement :
Généralement, la sonde de température (ou bulbe thermostatique) est logée dans la poignée de la vanne. Cette sonde est composée d'un liquide, d'un gel ou d'un gaz qui se dilate ou se contracte en fonction de la température qui l'environne. La position du clapet de réglage est déterminée par l'équilibre entre la poche de gaz et le ressort de rappel : lorsque la température mesurée est inférieure au point de consigne, le bulbe thermostatique se contracte, le ressort entraîne une ouverture du clapet de réglage et le débit est augmenté dans le radiateur. L'inverse se produit quand la température mesurée est trop élevée.
Avantage : La stabilisation automatique de la température ambiante au niveau souhaité permet de réaliser des économies d'énergie lorsqu'elle est bien utilisée, car elle se fermera automatiquement lorsque la température souhaitée est atteinte et s'il y a des apports de chaleur extérieurs (soleil entrant par les fenêtres, four, feu de cheminée).
Inconvénient : Si on oublie de fermer manuellement la vanne alors qu'on laisse une fenêtre ouverte, la vanne réagit à la baisse de température et fait fonctionner le radiateur à plein régime, entraînant un gaspillage de chaleur.
Conclusion: Cette dernière solution est plus ou moins celle proposée par FESTO. De plus, ces derniers nous ont proposé d’étudier longuement notre système et de créer une nouvelle vanne thermostatique qui n’existe pas toujours pas sur le marché et qui va spécialement être conçue pour le projet.
Semaine 8 et 9
La logique floue (fuzzy logic, en anglais) est une extension de la logique classique aux raisonnements approchés. Par ses aspects numériques, elle s'oppose aux logiques modales.
Elle s'appuie sur la théorie mathématique des ensembles flous. Cette théorie est une extension de la théorie des ensembles classiques aux ensembles définis de façon imprécise. Partant d'un concept de fonction d'appartenance à valeur dans [0, 1.
La logique floue présente aussi l'intérêt d'être plus facile et moins chère à implémenter qu'une logique probabiliste, elle est utilisée dans le cas des systèmes difficilement identifiables ou dont les paramètres subissent des variations brutales.
À l'inverse de l'algèbre de Boole, la logique floue autorise la valeur de vérité d'une condition à parcourir un autre domaine que la paire {vrai,faux}. En logique floue, il y a des degrés dans la satisfaction d'une condition, en effet, dans notre cas, Cette logique est le moyen idéal pour commander notre électrovanne, car nous avons un système qui peut subir à plusieurs variations (pression, température extérieur..) notre but est donc maintenir la température dans la salle à 20° quelques soient les variations.
Les informations à l’entrée de notre commande sont les températures provenues du capteur de température à la salle, cette dernière varie entre 8° et 25°, en effet nous distinguons deux commandes une avec une seule entrée et une avec deux entrée avec toujours une sortie qui sera le courant de l’entrée de la vanne thermostatique, ce dernier variera approximativement entre 4 et 20 mA, nous avons donc choisi ces plages de variation pour avoir un compromis entre la stabilité et la précision, pour ouvrir la vanne, nous avons soit ouvrir totalement, soit ouvrir beaucoup, et la même chose pour fermer, alors que dans le cas où la température dans la salle est égale à la consigne, le plongeur est à sa position initial 50% ouvert et 50% fermé.
Nous différencions les cas de la commande avec une seule entrée et celle avec deux entrées :
Cas 1 : une entrée
Dans ce cas notre entrée qui est l’erreur sera la différence entre notre consigne (20°) et la température provenue du capteur, notre erreur variera donc entre -5° (s’il fait chaud température avec une température dans la salle de 25°) et 12° (s’il fait froid avec une température dans la salle de 8°).
Quand l’erreur est égale à 0, cela veut dire que la température dans la salle est égale à la consigne, donc il fait « Bon » et quand elle est entre -5 et 0, il fait chaud et froid quand l’erreur est entre 0 et 12. Donc par exemple quand l’erreur est égale à 6, il fait 50% froid et 50% bon et nous n’allons pas chauffer de la même manière si l’erreur est égale à 12.
Les plages de variation de la sortie qui est le courant de commande de la vanne thermostatique étaient choisies fin d’obtenir un système précis. Quand la vanne est à 50% ouverte et 50% fermée, nous somme dans la moitié de notre plage de courant donc 12 mA, alors si nous somme inférieure à cette valeur la vanne est fermée sinon elle est ouverte.


Les règles étables pour relier les entrées aux sorties sont les suivantes :

Cas 2 : deux entrées
Dans ce cas nous avons deux entrées, l’erreur et la variation de l’erreur.
L’erreur est la même que le premier cas alors que les plages de sa variation sont entre -13 et 13 pour avoir plus de précision, à 0 la variation de l’erreur est constante, si elle est inférieure à 0 elle se refroidit, sinon elle se réchauffe.
Nous avons donc choisi ces plages de variation pour avoir un compromis entre la stabilité et la précision, pour ouvrir la vanne, nous avons soit ouvrir totalement, soit ouvrir beaucoup, et la même chose pour fermer, alors que dans le cas où la température dans la salle est égale à la consigne, le plongeur est à sa position initial 50% ouvert et 50% fermé.


Les règles étables pour relier les entrées aux sorties sont les suivantes :

Simulink

Le « Step » en entrée représente notre température de consigne (20°) et le scope à la fin sert à visualiser notre simulation, le radiateur est modélisé par une fonction de transfert du premier ordre avec une constante de temps égale à 90 (constante de temps thermique très grande).
Pour un régulateur floue à deux entrées. Nous remarquons que nous avons un système pas stable, cela peut être expliqué par la difficulté d’associer deux entrées à une sortie, de plus les perturbations ajoutés qui modélisent les fuites thermiques empêchent le système d’atteindre sa valeur de consigne.

Pour une commande avec une seule entrée, nous avons un système beaucoup plus stable avec un temps de réponse grand mais qui se stabilise à sa valeur de consigne 20°.
