Commande d'une suspension magnétique : Différence entre versions
(→Semaine 3(02.08-02.012)) |
(→Description du projet) |
||
| Ligne 18 : | Ligne 18 : | ||
En effet, contrairement à la lévitation par d'autres moyens, la sustentation magnétique par attraction est instable.Donc, on doit trouver une méthodes pour contrôler et stabiliser un système de suspension magnétique. lorsque la bille est déplacée vers l'électroaimant, la force magnétique augmente et finit par la faire coller à la buttée haute. A l'inverse, lorsqu'on l'éloigne de l'électroaimant, la force diminue et elle finit par tomber. Le problème est alors de maîtriser la force d'attraction de cet électroaimant et de positionner la boule à une hauteur déterminée avec une dynamique fixée par un cahier des charges. | En effet, contrairement à la lévitation par d'autres moyens, la sustentation magnétique par attraction est instable.Donc, on doit trouver une méthodes pour contrôler et stabiliser un système de suspension magnétique. lorsque la bille est déplacée vers l'électroaimant, la force magnétique augmente et finit par la faire coller à la buttée haute. A l'inverse, lorsqu'on l'éloigne de l'électroaimant, la force diminue et elle finit par tomber. Le problème est alors de maîtriser la force d'attraction de cet électroaimant et de positionner la boule à une hauteur déterminée avec une dynamique fixée par un cahier des charges. | ||
<BR>Ce projet débute par une étude bibliographique sur la modélisation de la suspension magnétique, ainsi que sur différentes techniques de commande de systèmes linéaires. La seconde phase consiste en la prise en main de la plate-forme de contrôle basée sur les logiciels. Ce projet s'achève par la mise en œuvre de quelques méthodes de commande analogiques et numériques ( PID RST et retour d'état principalement) suivie d’une étude comparative de leurs performances. | <BR>Ce projet débute par une étude bibliographique sur la modélisation de la suspension magnétique, ainsi que sur différentes techniques de commande de systèmes linéaires. La seconde phase consiste en la prise en main de la plate-forme de contrôle basée sur les logiciels. Ce projet s'achève par la mise en œuvre de quelques méthodes de commande analogiques et numériques ( PID RST et retour d'état principalement) suivie d’une étude comparative de leurs performances. | ||
| − | + | <BR>[[Fichier:didastel.png]] | |
====Choix techniques : matériel et logiciel==== | ====Choix techniques : matériel et logiciel==== | ||
Version du 11 février 2016 à 10:42
Cahier des charges
Présentation générale du projet
Contexte
Un domaine d'application de la mécatronique est celui de la sustentation magnétique par attraction. Cette technique est actuellement abordable autant d'un point de vue technologique qu'économique. Mais pour être efficace, la sustentation magnétique par attraction doit être stable. La suspension magnétique est une technologie avec laquelle l’objet est suspendu par la force électromagnétique. Elle est utilisée dans plusieurs domaines par exemple un système de train magnétique (à Shanghai, Chine).


Objectif du projet
Le but de notre projet est de consister à chercher différentes méthodes pour contrôler et stabiliser un système de suspension magnétique, un système de 3ème ordre.
Après avoir discuté avec notre tuteur,nous devons réaliser le fonctionnement principaux comme ce que ils ont fait à 2013. Nous allons progresser le système si les fonctionnement principaux sont bien realisés.
Description du projet
En effet, contrairement à la lévitation par d'autres moyens, la sustentation magnétique par attraction est instable.Donc, on doit trouver une méthodes pour contrôler et stabiliser un système de suspension magnétique. lorsque la bille est déplacée vers l'électroaimant, la force magnétique augmente et finit par la faire coller à la buttée haute. A l'inverse, lorsqu'on l'éloigne de l'électroaimant, la force diminue et elle finit par tomber. Le problème est alors de maîtriser la force d'attraction de cet électroaimant et de positionner la boule à une hauteur déterminée avec une dynamique fixée par un cahier des charges.
Ce projet débute par une étude bibliographique sur la modélisation de la suspension magnétique, ainsi que sur différentes techniques de commande de systèmes linéaires. La seconde phase consiste en la prise en main de la plate-forme de contrôle basée sur les logiciels. Ce projet s'achève par la mise en œuvre de quelques méthodes de commande analogiques et numériques ( PID RST et retour d'état principalement) suivie d’une étude comparative de leurs performances.

Choix techniques : matériel et logiciel
* les logiciels: Simulink, Real Time Windows Target. * le machine: la suspension magnetique didastel
Problématique
Fonction Transfert pour le système
Avancement du Projet
Semaine 1(01.25-01.31)

Semaine 2(02.01-02.07)
Un objet magnétique est soumis à l'attraction d'un électroaimant dans lequel on contrôle l'intensité, I. Un capteur de position optique permet de mesurer la distance séparant l'objet de électroaimant. Ainsi on peut agir sur la distance mesurée, x, entre cet objet et électroaimant via le courant I, la force d'attraction étant une fonction croissante de l'intensité. La commande du système consiste à contrôler l'intensité, I, en fonction de la distance x.

La distance séparant l'objet de électroaimant est notée x et l'axe x est dirigé positivement " vers le bas "
Le capteur de position associé à son électronique fourni le signal Vx=-a.x ( Vx diminue si x augmente ) donc Vx augmente si x diminue c'est à dire si l'objet monte. Vx représente donc l'altitude de l'objet.
La bobine de électroaimant possède la résistance R et l'inductance L. On négligera l'influence de la position de l'objet ( donc de x ) sur la valeur L.
La masse de l'objet suspendu est M.
L'accélération de la pesanteur est g.
Le courant dans la bobine est I.
La force d'attraction créée par le courant I sur l'objet est F=F(I,x).
La force d'attraction dans la direction x est donnée par la relation : F = − dW où W dx est l'énergie emmagasinée par le système soit:W=1/2*L* I^2 si le matériau magnétique n'est pas saturé.
Soit:F=1/2*I^2*(−dL/dx)

Le contrôle de l'altitude de l'objet s'effectue en contrôlant la force d'attraction c'est à dire le courant, pour ce faire nous modifions la tension (Vk) sur la bobine de électroaimant. Il apparaît donc plus judicieux de régler directement le courant dans la bobine, ainsi la commande sera plus aisée en asservissant le courant plutôt qu'en agissant sur la tension d'alimentation de électroaimant. Nous allons donc étudier le cas où le courant est asservi.
Nous utiliserons donc toujours une commande en courant de électroaimant plutôt qu'une commande en tension car ainsi le modèle est seulement du second ordre au lieu du troisième ce qui conduira à une commande plus aisée et à des performances dynamiques meilleures.
Semaine 3(02.08-02.12)
A L'aide du document"Mise en Equation de la suspension magnétique.pdf", nous avons bien compris ce système, Ce système est divisé en 3 parties. Pour la partie électro-aimant, on injecte d'abord une tension qui va surement créer un courant électrique, le champ magnétique ainsi créé provoque une force qui soutient le ballon dans la position désirée.
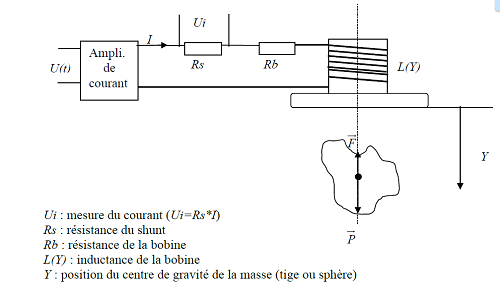

selon cette image,La masse est soumise à deux forces opposées :
La force F est engendrée par le courant I qui parcours la bobine et dépend aussi de Y.l'équation du mouvement est donnée par la loi fondamentale de dynamique: md2Y/dt2 = mg - F(Y,I).
le courant I est fourni par un amplificateur de courant à partie de la tension de commande U(t). cette boucle de courant peut être modélisée par un circuit RL, donc l'équation électrique: kU = RI + L dI/dt.
ce système est donc régi par les deux équation suivant:
les fonctions de transfert de ce système :
G_1=(I(p))/(U(p))=K_1/(1+τ_e∙p)
G_2=(X(p))/(I(p))=K_2/(1-〖τ_m〗^2∙p^2 )
G=(-K)/((1+τ_e∙p)∙(1-〖τ_m〗^2∙p^2))